










Немцы приделали роботу Justin «ноги»

Иногда новые роботы поражают нас своими возможностями – сегодня это уже не те дурацкие муляжи 80-х, с лампочками в глазах и «ртах» и антеннами, торчащими из «головы», публиковавшиеся в «Юном Технике» – сегодня это сверхсложные механизмы, имеющие самое настоящее трехмерное зрение, кучу сенсоров вроде акселерометров и гироскопов, оснащенные мощными процессорами и невероятно сложным программным обеспечением.
Новые роботы, учащиеся двигаться и оценивать ситуацию как человек и работать с уже имеющимися инструментами, вселяют в человечество надежду на скорое и полное избавление от ненужной рутины (вроде уборки дома и ухода за садом) и от присутствия человека в крайне неблагоприятных условиях (например, на химическом производстве или в космосе). И наука двигается в этом направлении семимильными шагами.
Если новые роботы отлично научатся управляться не только с инструментами, но и со своими «конечностями», то их смело можно будет посылать в космос, где требуется устойчивость к излучению и абсолютная точность движений. Именно поэтому на МКС уже сегодня работает робот NASA – Robonaut 2.

Robonaut 2 – довольно продвинутая машина и имеет весьма «проворные» «руки», но NASA – это не единственное космическое агентство, работающее в направлении «космических роботов».
В Германии тоже ведутся разработки сверхсложных машин, поражающих воображение. Одной из таких является Rollin’ Justin, созданная немецким аэрокосмическим агентством DLR. Хоть Justin и выглядит как игрушка, возможностями он обладает поистине фантастическими – недавно робот научился ловить два мяча, одновременно брошенных ему человеком. Причем, с точностью в 80%. Думаете – ерунда? Как бы ни так, для робототехники это огромное достижение сравнимое с BigDog от Boston Dynamics.
Rollin’ Justin практически автономен – он использует для отслеживания летящего мяча в трехмерном пространстве свои «глаза» – сенсоры и камеры, затем робот с высокой точностью просчитывает скорость и наиболее вероятную траекторию брошенного мяча и выставляет свои конечности там, где мяч достигнет его месторасположения. Конечности у робота имеют множество степеней свободы и не имеют ограничений по позиционированию в пространстве. При этом они двигаются невероятно быстро и точно. Rollin’ Justin может «выкинуть» руку под мяч в течении пяти миллисекунд!
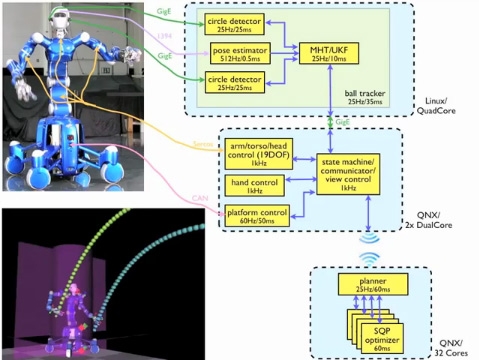
Управляют роботом две отдельные компьютерные системы – одна из них с четырехъядерным процессором и работает под Linux’ом – она обсчитывает данные, поступающие с сенсоров (глаз робота – двух камер и датчика Xsens IMU, отслеживающего объекты в трехмерном пространстве). Другая система оснащена двухъядерным процессором и ОС QNX и управляет сервоприводами (конечностями). Однако и этой вычислительной мощности мало – по беспроводному каналу машина связывается с большим компьютером с 32 процессорными ядрами (ОС QNX).
http://www.youtube.com/watch?v=R6pPwP3s7s4
Лучше, конечно, один раз увидеть, чем сто раз услышать – поэтому обязательно посмотрите видеоролик, расположенный выше. Но RJ умеет не только ловить мячи. Путем модификации скриптов, его можно заставить делать все, что угодно – в видеоролике показано, как робот готовит кофе, например. Уверен, что при желании его можно заставить постричь человека или приготовить хороший омлет с беконом!





